riskmapjnr Python package¶


![]()
![]()
![]()
Overview¶
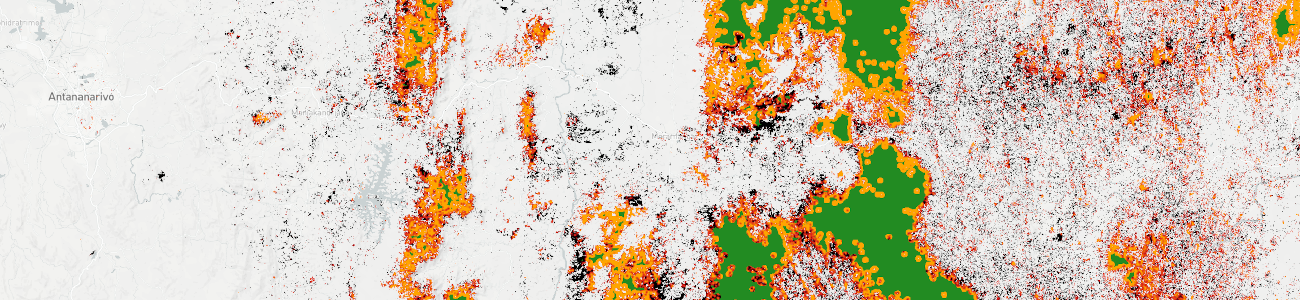
The riskmapjnr Python package can be used to obtain maps of the
spatial risk of deforestation and forest degradation following the
methodology developed in the context of the Jurisdictional and Nested
REDD+ (JNR) and using only a forest cover change map as input.
Statement of Need¶
The VCS (Verified Carbon Standard) program allows certified projects to turn their greenhouse gas (GHG) emission reductions and removals into tradable carbon credits. Since its launch in 2006, the VCS program has grown into the world’s largest voluntary GHG program.
In the forest sector, programs to mitigate GHG emissions across entire national or subnational jurisdictions (called REDD+ programs, i.e. programs aiming at Reducing Emissions from Deforestation and Forest Degradation) can be accounted for and credited using a jurisdictional-scale framework, the Jurisdictional and Nested REDD+ (JNR) framework. JNR integrates government-led and project-level REDD+ activities and establishes a clear pathway for subnational- and project-level activities to be incorporated within broader REDD+ programs. The JNR framework ensures all projects and other reducing emissions from deforestation and degradation activities in a given jurisdiction are developed using consistent baselines and crediting approaches. They mitigate the risk of “leakage”, i.e. the displacement of emission-causing activities to areas outside the project boundary, by monitoring emissions across an entire jurisdictional area.
The JNR Risk Mapping Tool is a “benchmark” methodology that provides a standardized approach for developing deforestation and forest degradation risk maps for users of the JNR Allocation Tool in the context of Jurisdictional and Nested REDD+ (JNR) requirements. The methodology allows deriving a map of the deforestation (or degradation) risk based on a minimal spatial information provided by the past deforestation (or degradation) map at the jurisdictional scale.
The JNR Risk Mapping Tool allows the creation of categorical and spatially static maps whose categories represent different levels of risk of deforestation or forest degradation in the validity period of the Forest Reference Emissions Level (FREL) and throughout the jurisdictional geographical boundaries. In the JNR Allocation Tool, the level of risk determines how the jurisdictional FREL is spatially distributed to nested lower-level jurisdictional programs and projects.
While the JNR Risk Mapping Tool methodology favors simplicity,
obtaining the risk map is not straightforward. The approach requires
several geoprocessing steps on raster data that can be large,
i.e. covering large spatial extent (eg. national scale) at high
spatial resolution (eg. 30 m). The riskmapjnr Python package
includes functions to perform these geoprocessing steps and derive a
risk map on any jurisdiction and at any spatial resolution following
the JNR Risk Mapping Tool methodology.
Installation¶
You will need several dependencies to run the riskmapjnr Python
package. The best way to install the package is to create a Python
virtual environment, either through conda (recommended) or
virtualenv.
Using conda (recommended)¶
You first need to have miniconda3 installed (see here).
Then, create a conda environment (details here)
and install the riskmapjnr package with the following commands:
conda create --name conda-rmj -c conda-forge python=3 gdal numpy matplotlib pandas pip scipy --yes
conda activate conda-rmj
pip install riskmapjnr # For PyPI version
# pip install https://github.com/ghislainv/riskmapjnr/archive/master.zip # For GitHub dev version
# conda install -c conda-forge sphinx flake8 jedi jupyter geopandas descartes folium --yes # Optional additional packages
To deactivate and delete the conda environment:
conda deactivate
conda env remove --name conda-rmj
Using virtualenv¶
You first need to have the virtualenv package installed (see here).
Then, create a virtual environment and install the riskmapjnr
package with the following commands:
cd ~
mkdir venvs # Directory for virtual environments
cd venvs
virtualenv --python=/usr/bin/python3 venv-rmj
source ~/venvs/venv-rmj/bin/activate
# Install numpy first
pip install numpy
# Install gdal (the correct version)
pip install --global-option=build_ext --global-option="-I/usr/include/gdal" gdal==$(gdal-config --version)
pip install riskmapjnr # For PyPI version, this will install all other dependencies
# pip install https://github.com/ghislainv/riskmapjnr/archive/master.zip # For GitHub dev version
# pip install sphinx flake8 jedi jupyter geopandas descartes folium # Optional additional packages
To deactivate and delete the virtual environment:
deactivate
rm -R ~/venvs/venv-rmj # Just remove the repository
Installation testing¶
You can test that the package has been correctly installed using the
command riskmapjnr in a terminal:
riskmapjnr
This should return a short description of the riskmapjnr package
and the version number:
# riskmapjnr: Map of deforestation risk following JNR methodology.
# https://ecology.ghislainv.fr/riskmapjnr/
# riskmapjnr version x.x.
You can also test the package executing the commands in the Get started tutorial.
Main functionalities¶
The riskmapjnr package includes functions to:
Estimate the distance to forest edge beyond which the deforestation risk is negligible:
dist_edge_threshold().Compute local deforestation rates using a moving window whose size can vary:
local_defor_rate().Transform local deforestation rates into categories of deforestation risks using several slicing algorithms:
set_defor_cat_zero()anddefor_cat()Validate maps of deforestation risk and select the map with the higher accuracy:
defrate_per_cat()andvalidation().
The riskmapjnr package uses several known Python scientific
packages such as NumPy, SciPy, and Pandas for fast matrix
and vector operations and gdal for processing georeferenced raster
data. Raster data are divided into blocks of data for in-memory
processing. Such an approach allow processing large raster files with
large geographical extents (e.g. country scale) and high spatial
resolutions (eg. 30 m).
Contributing¶
The riskmapjnr Python package is Open Source and released under
the GNU GPL version 3 license. Anybody
who is interested can contribute to the package development following
our Community guidelines. Every
contributor must agree to follow the project’s Code of conduct.